Tutorial: Inference with a pre-trained model.#
In this tutorial we will run inference on a pre-trained model for the PointNav task in the RoboTHOR environment. In this task the agent is tasked with going to a specific location within a realistic 3D environment.
For information on how to train a PointNav Model see this tutorial
We will need to install the full AllenAct library,
the robothor_plugin requirements via
pip install -r allenact_plugins/robothor_plugin/extra_requirements.txt
and download the RoboTHOR Pointnav dataset before we get started.
For this tutorial we will download the weights of a model trained on the debug dataset.
This can be done with a handy script in the pretrained_model_ckpts directory:
bash pretrained_model_ckpts/download_navigation_model_ckpts.sh robothor-pointnav-rgb-resnet
This will download the weights for an RGB model that has been
trained on the PointNav task in RoboTHOR to pretrained_model_ckpts/robothor-pointnav-rgb-resnet
Next we need to run the inference, using the PointNav experiment config from the tutorial on making a PointNav experiment. We can do this with the following command:
PYTHONPATH=. python allenact/main.py -o <PATH_TO_OUTPUT> -b <BASE_DIRECTORY_OF_YOUR_EXPERIMENT> -c <PATH_TO_CHECKPOINT> --eval
Where <PATH_TO_OUTPUT> is the location where the results of the test will be dumped, <PATH_TO_CHECKPOINT> is the
location of the downloaded model weights, and <BASE_DIRECTORY_OF_YOUR_EXPERIMENT> is a path to the directory where
our experiment definition is stored.
For our current setup the following command would work:
PYTHONPATH=. python allenact/main.py \
training_a_pointnav_model \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30/exp_PointNavRobothorRGBPPO__stage_00__steps_000039031200.pt \
--eval
For testing on all saved checkpoints we pass a directory to --checkpoint rather than just a single file:
PYTHONPATH=. python allenact/main.py \
training_a_pointnav_model \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30
--eval
Visualization#
We also show examples of visualizations that can be extracted from the "valid" and "test" modes. Currently,
visualization is still undergoing design changes and does not support multi-agent tasks, but the available functionality
is sufficient for pointnav in RoboThor.
Following up on the example above, we can make a specialized pontnav ExperimentConfig where we instantiate
the base visualization class, VizSuite, defined in
allenact.utils.viz_utils, when in test mode.
Each visualization type can be thought of as a plugin to the base VizSuite. For example, all episode_ids passed to
VizSuite will be processed with each of the instantiated visualization types (possibly with the exception of the
AgentViewViz). In the example below we show how to instantiate different visualization types from 4 different data
sources.
The data sources available to VizSuite are:
- Task output (e.g. 2D trajectories)
- Vector task (e.g. egocentric views)
- Rollout storage (e.g. recurrent memory, taken action logprobs...)
ActorCriticOutput(e.g. action probabilities)
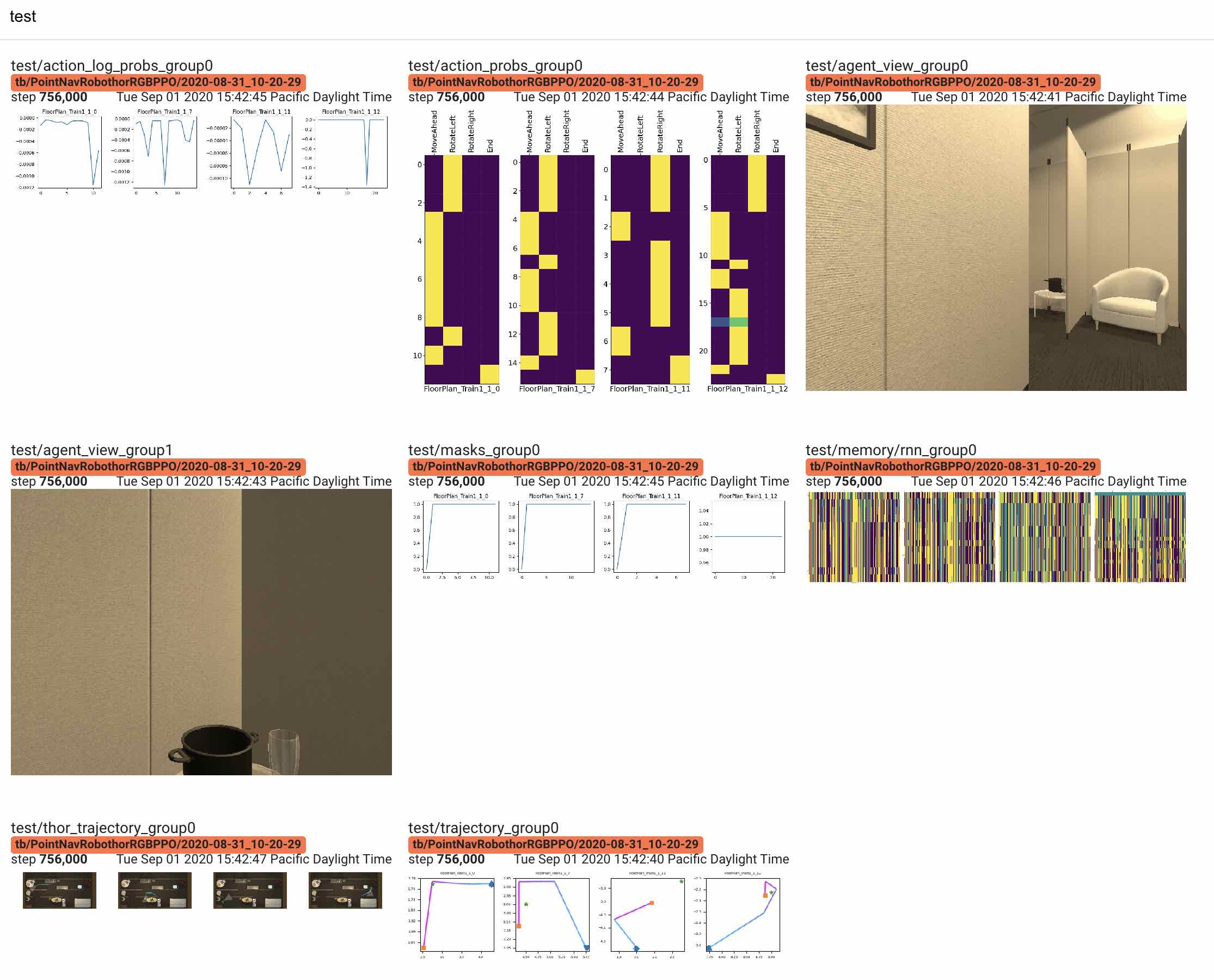
The visualization types included below are:
TrajectoryViz: Generic 2D trajectory view.AgentViewViz: RGB egocentric view.ActorViz: Action probabilities fromActorCriticOutput[CategoricalDistr].TensorViz1D: Evolution of a point from RolloutStorage over time.TensorViz2D: Evolution of a vector from RolloutStorage over time.ThorViz: Specialized 2D trajectory view for RoboThor.
Note that we need to explicitly set the episode_ids that we wish to visualize. For AgentViewViz we have the option
of using a different (typically shorter) list of episodes or enforce the ones used for the rest of visualizations.
class PointNavRoboThorRGBPPOVizExperimentConfig(PointNavRoboThorRGBPPOExperimentConfig):
"""ExperimentConfig used to demonstrate how to set up visualization code.
# Attributes
viz_ep_ids : Scene names that will be visualized.
viz_video_ids : Scene names that will have videos visualizations associated with them.
"""
viz_ep_ids = [
"FloorPlan_Train1_1_3",
"FloorPlan_Train1_1_4",
"FloorPlan_Train1_1_5",
"FloorPlan_Train1_1_6",
]
viz_video_ids = [["FloorPlan_Train1_1_3"], ["FloorPlan_Train1_1_4"]]
viz: Optional[VizSuite] = None
def get_viz(self, mode):
if self.viz is not None:
return self.viz
self.viz = VizSuite(
episode_ids=self.viz_ep_ids,
mode=mode,
# Basic 2D trajectory visualizer (task output source):
base_trajectory=TrajectoryViz(
path_to_target_location=("task_info", "target",),
),
# Egocentric view visualizer (vector task source):
egeocentric=AgentViewViz(
max_video_length=100, episode_ids=self.viz_video_ids
),
# Default action probability visualizer (actor critic output source):
action_probs=ActorViz(figsize=(3.25, 10), fontsize=18),
# Default taken action logprob visualizer (rollout storage source):
taken_action_logprobs=TensorViz1D(),
# Same episode mask visualizer (rollout storage source):
episode_mask=TensorViz1D(rollout_source=("masks",)),
# Default recurrent memory visualizer (rollout storage source):
rnn_memory=TensorViz2D(rollout_source=("memory", "single_belief")),
# Specialized 2D trajectory visualizer (task output source):
thor_trajectory=ThorViz(
figsize=(16, 8),
viz_rows_cols=(448, 448),
scenes=("FloorPlan_Train{}_{}", 1, 1, 1, 1),
),
)
return self.viz
def machine_params(self, mode="train", **kwargs):
res = super().machine_params(mode, **kwargs)
if mode == "test":
res.set_visualizer(self.get_viz(mode))
return res
Running test on the same downloaded models, but using the visualization-enabled ExperimentConfig with
PYTHONPATH=. python allenact/main.py \
running_inference_tutorial \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30/exp_PointNavRobothorRGBPPO__stage_00__steps_000039031200.pt \
--eval
generates different types of visualization and logs them in tensorboard. If everything is properly setup and
tensorboard includes the robothor-pointnav-rgb-resnet folder, under the IMAGES tab, we should see something similar
to