Primary abstractions#
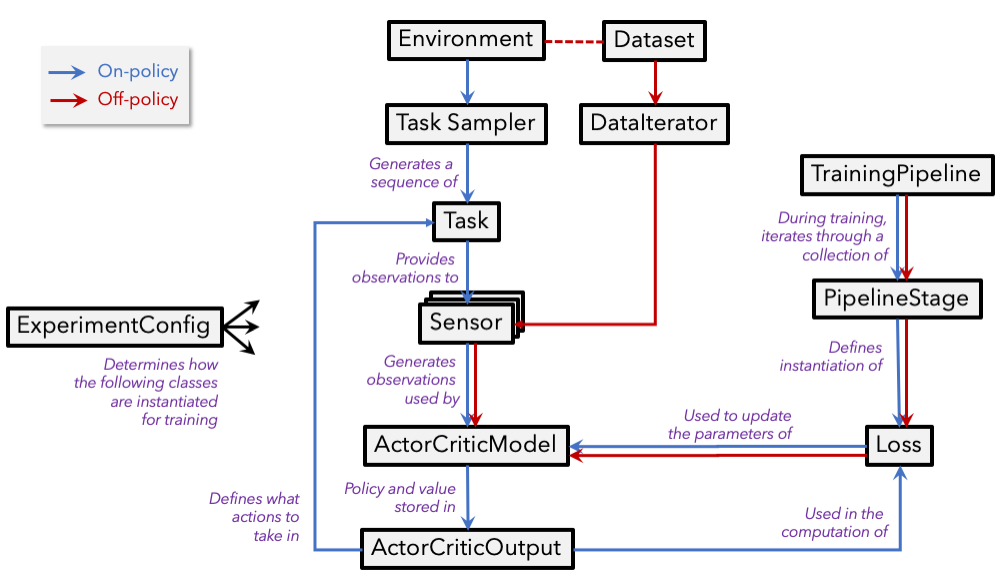
Our package relies on a collection of fundamental abstractions to define how, and in what task, an agent should be trained and evaluated. A subset of these abstractions are described in plain language below. Each of the below sections end with a link to the (formal) documentation of the abstraction as well as a link to an example implementation of the abstraction (if relevant). The following provides a high-level illustration of how these abstractions interact.
Experiment configuration#
In allenact, experiments are defined by implementing the abstract ExperimentConfig class. The methods
of this implementation are then called during training/inference to properly set up the desired experiment. For example,
the ExperimentConfig.create_model method will be called at the beginning of training to create the model
to be trained.
See either the "designing your first minigrid experiment" or the
"designing an experiment for point navigation"
tutorials to get an in-depth description of how these experiment configurations are defined in practice.
See also the abstract ExperimentConfig class
and an example implementation.
Task sampler#
A task sampler is responsible for generating a sequence of tasks for agents to solve. The sequence of tasks can be randomly generated (e.g. in training) or extracted from an ordered pool (e.g. in validation or testing).
See the abstract TaskSampler class
and an example implementation.
Task#
Tasks define the scope of the interaction between agents and an environment (including the action types agents are
allowed to execute), as well as metrics to evaluate the agents' performance. For example, we might define a task
ObjectNaviThorGridTask in which agents receive observations obtained from the environment (e.g. RGB images) or directly from
the task (e.g. a target object class) and are allowed to execute actions such as MoveAhead, RotateRight,
RotateLeft, and End whenever agents determine they have reached their target. The metrics might include a
success indicator or some quantitative metric on the optimality of the followed path.
See the abstract Task class
and an example implementation.
Sensor#
Sensors provide observations extracted from an environment (e.g. RGB or depth images) or directly from a task (e.g. the end point in point navigation or target object class in semantic navigation) that can be directly consumed by agents.
See the abstract Sensor class
and an example implementation.
Actor critic model#
The actor-critic agent is responsible for computing batched action probabilities and state values given the observations provided by sensors, internal state representations, previous actions, and potentially other inputs.
See the abstract ActorCriticModel class
and an
example implementation.
Training pipeline#
The training pipeline, defined in the
ExperimentConfig's training_pipeline method,
contains one or more training stages where different
losses can be combined or sequentially applied.
Losses#
Actor-critic losses compute a combination of action loss and value loss out of collected experience that can be used to train actor-critic models with back-propagation, e.g. PPO or A2C.
See the
AbstractActorCriticLoss class
and an example implementation.
Off-policy losses implement generic training iterations in which a batch of data is run through a model (that can be a
subgraph of an ActorCriticModel) and a loss is
computed on the model's output.
See the
AbstractOffPolicyLoss class
and an example implementation.